Welkin Aves
Startup prototype • Drone battery swapping station (hardware + control + CAD)

Welkin Aves was a startup I co-founded in 2019 to address drone flight-time limitations through a battery-swapping station. Starting as a college project, we learned and applied SolidWorks, 3D printing, Python, Arduino programming, and microcontroller integration to build and demonstrate a working prototype with mentor + incubator support.
TL;DR
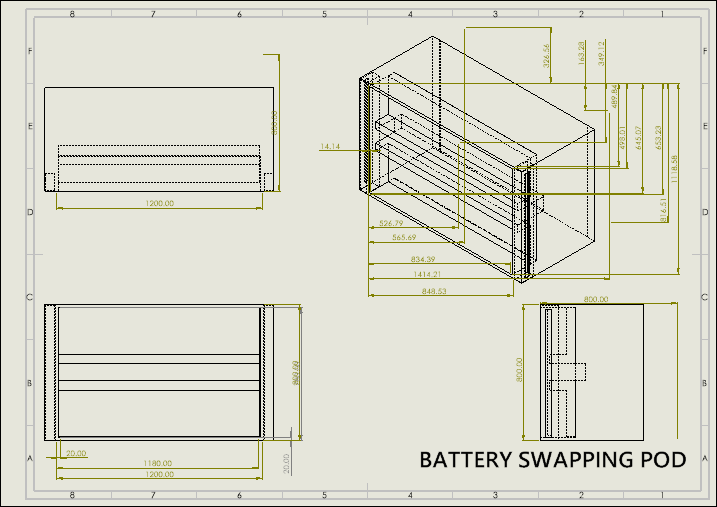
Battery-swapping station prototype to extend drone uptime: redesigned battery shell + alignment/locking mechanisms + actuator control.
My role
Co-founded and built the prototype: CAD design, hardware/software integration, actuator control, and demo/testing workflows.
Tech
Links
Highlights
- Developed a custom drone + battery swapping mechanism
- Seamless integration of hardware and software for reliable swapping
- Achievements: raised $12,000; won Idea Fest 2021 and 2022 (Kerala Startup Mission)
Key components
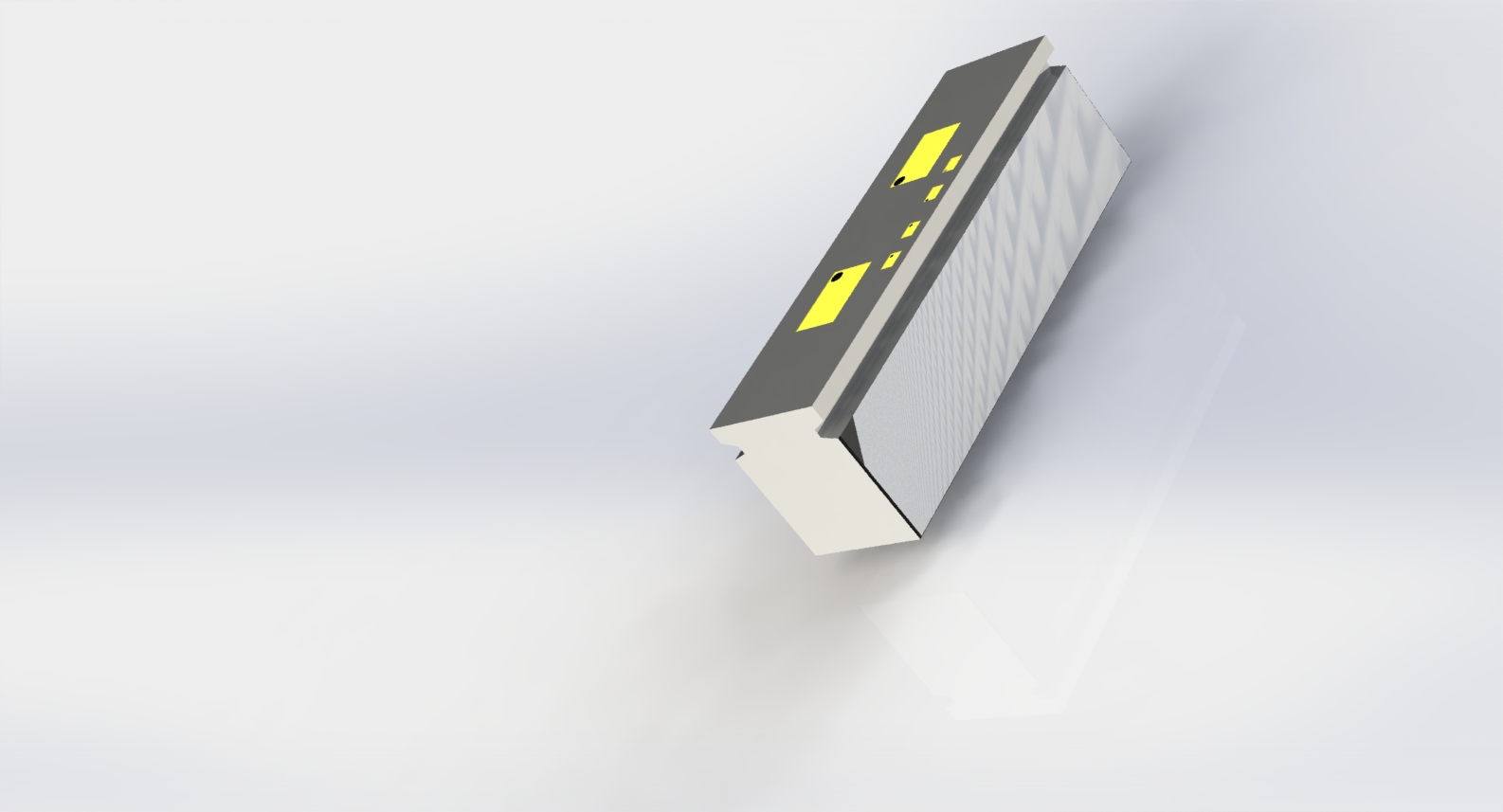
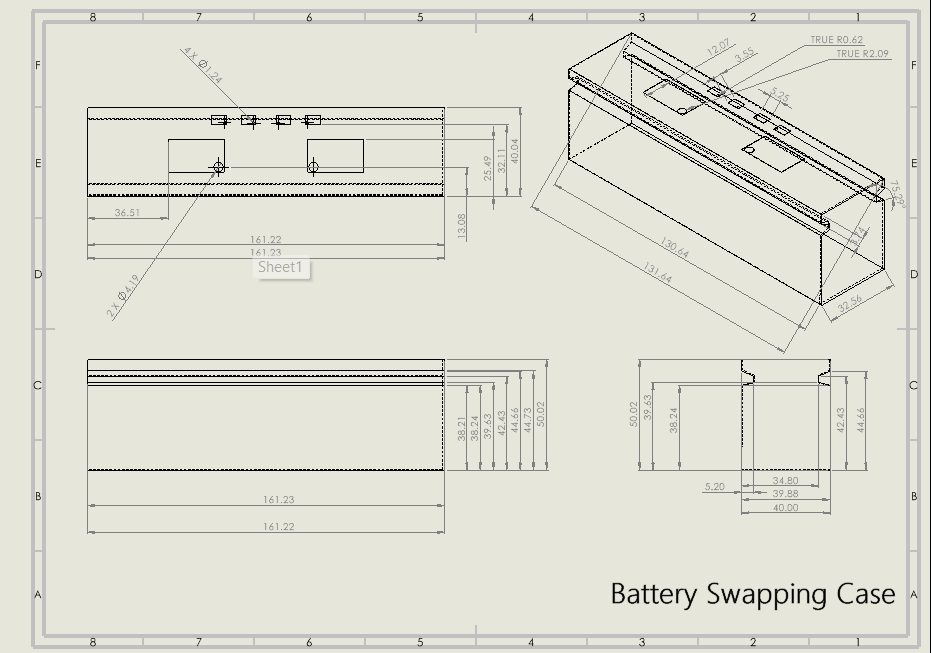
Battery
Modified a 5000mAh 11.1V LiPo battery with a custom shell using connecting plates as terminals. Designed for quick insert/remove with minimal manual intervention.
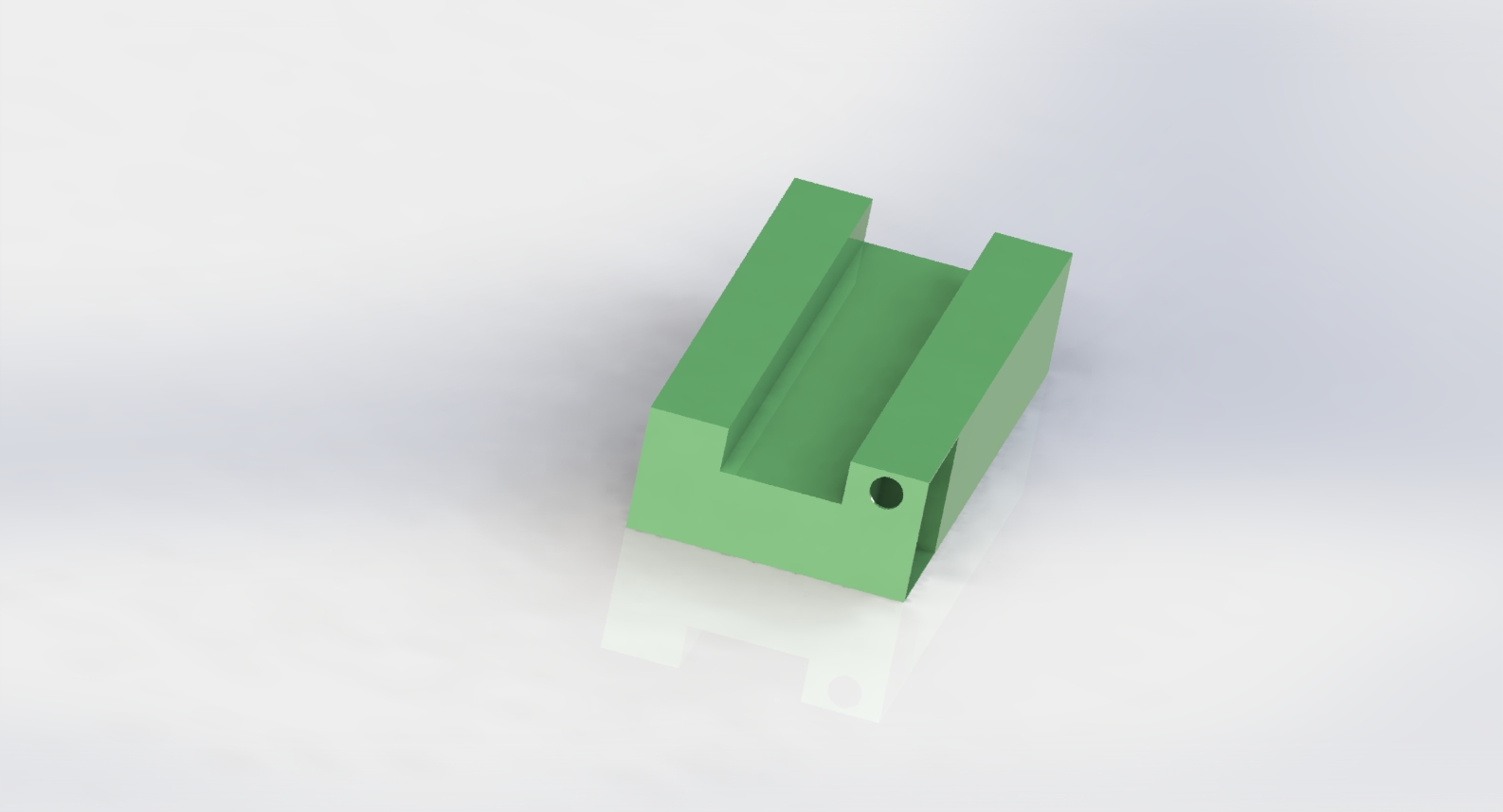
Battery holder
Mounted on the main actuator; secures the battery during operation using a servo-based locking mechanism.
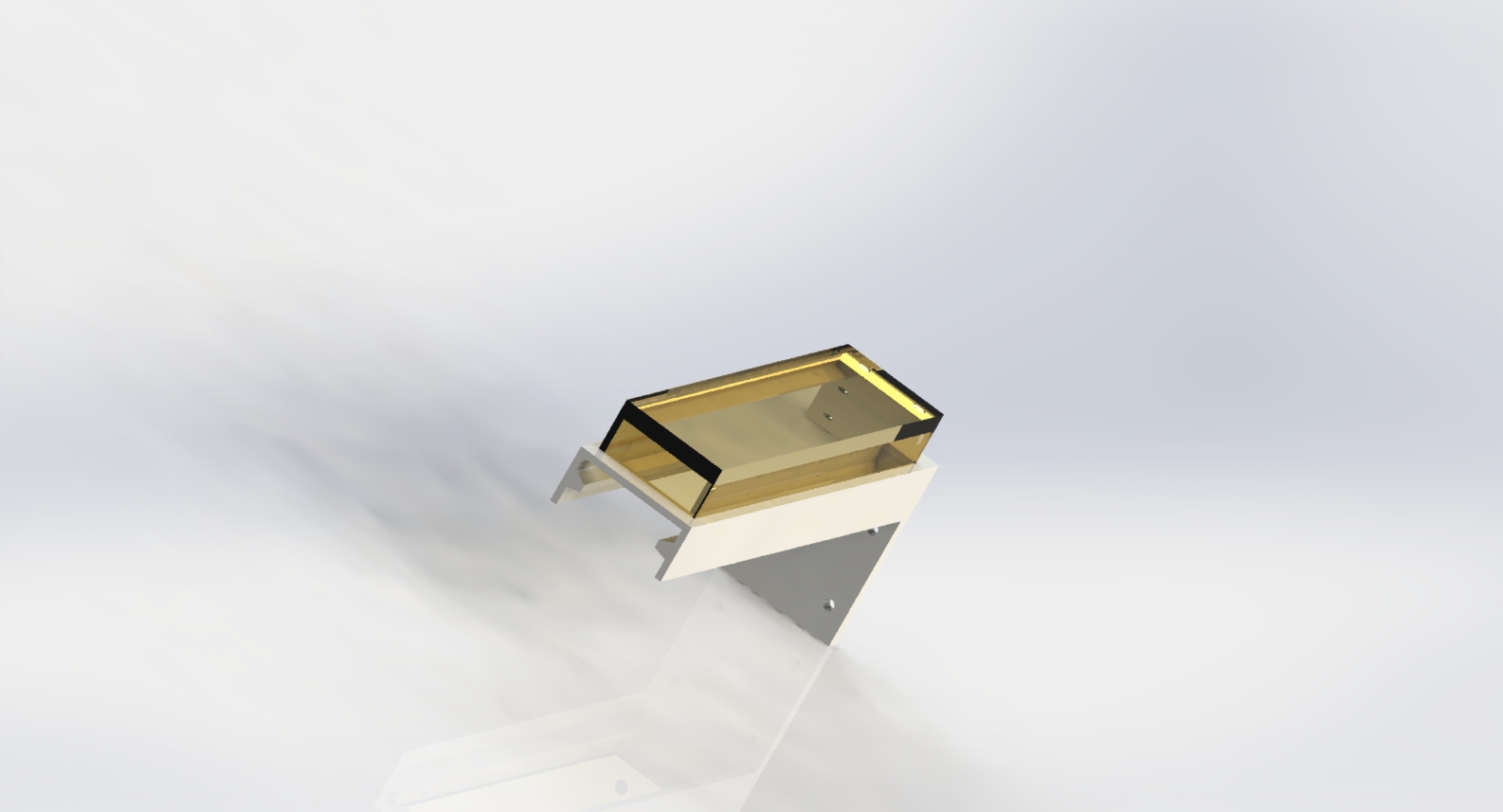
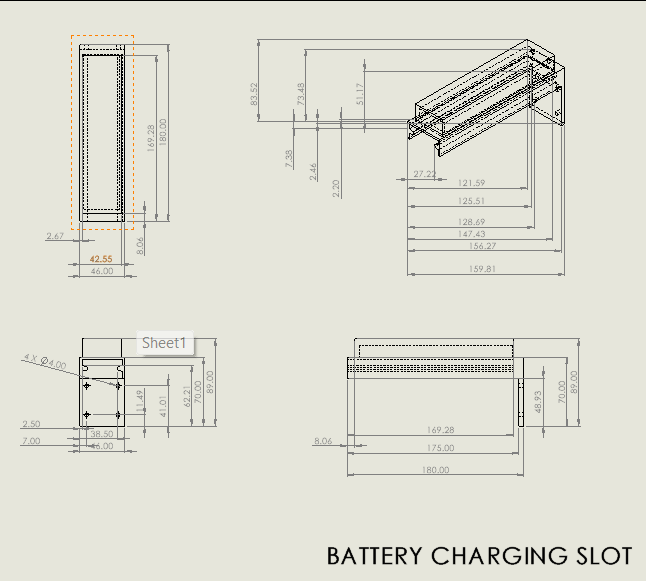
Charger
Modified LiPo charger with pogo pins for seamless connectivity with the custom battery shell.
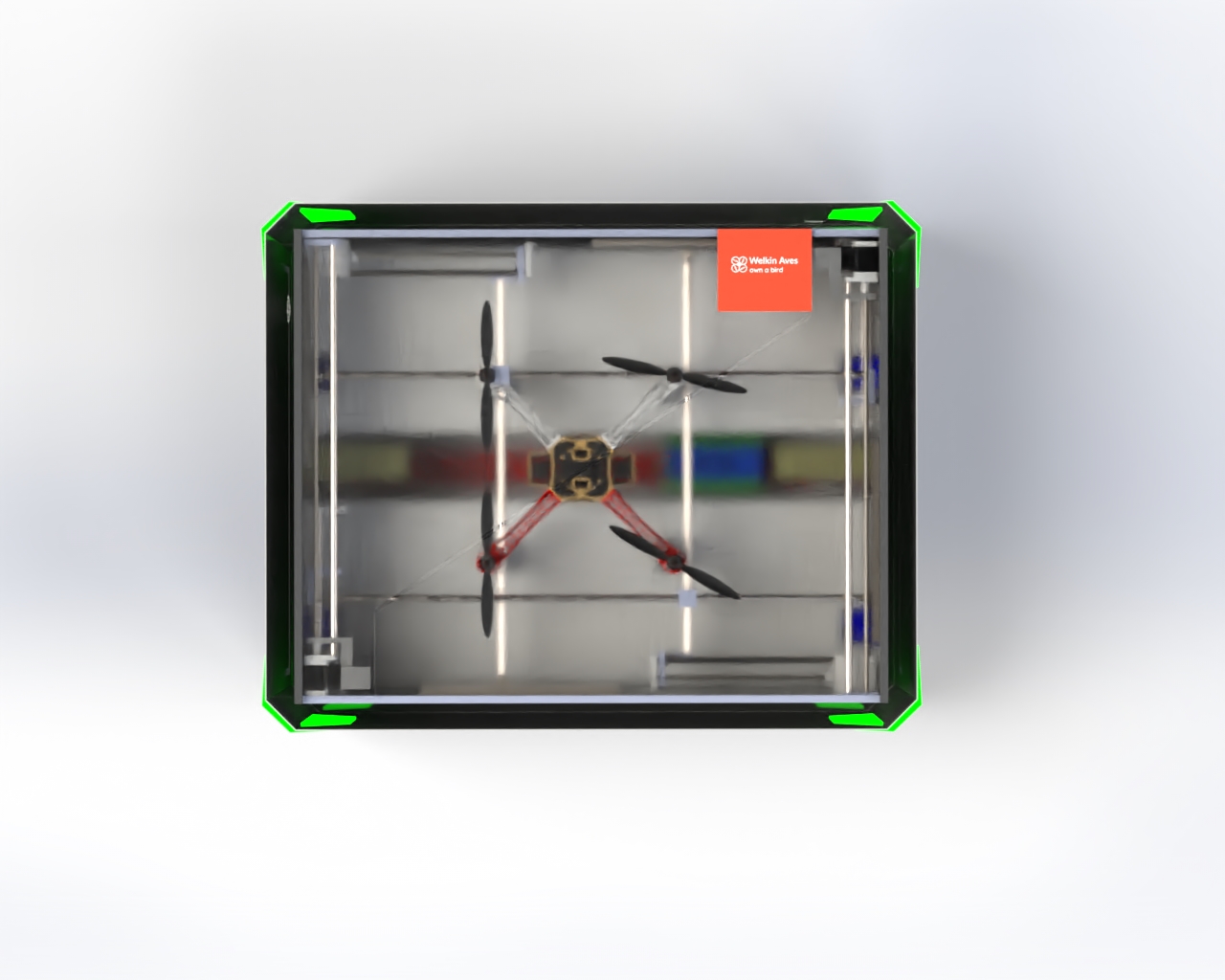
Aligner
Ensures precise positioning of the drone for accurate alignment between onboard battery and holder. Includes horizontal and vertical alignment powered by linear actuators, controlled by Arduino.
Leveler
Adjusts landing plate height for consistent alignment during swapping using linear actuators (Arduino-controlled).
Technology stack
- Hardware: Arduino Uno/Nano, Raspberry Pi 4, servo motors, linear actuators
- Software: Python, Embedded C, Arduino IDE
- Design: SolidWorks (CAD)
Media
Collaborators / support
Supported by AICTE IDEA Lab, Rajadhani Institute of Engineering and Technology, and Kerala Startup Mission.



Repository
Explore the code and CAD designs on GitHub: Welkin Aves